Vektoren Definition
Grundlagen und Definitionen von Vektoren im Koordinatensystem
Ein Vektor ist in der Mathematik ein Objekt, das durch zwei Charakteristika definiert wird: Größe (Betrag) und Richtung. Vektoren werden im Koordinatensystem als Zahlenlisten dargestellt, können aber auch geometrisch als Pfeile visualisiert werden, die vom Ursprung zu einem bestimmten Punkt zeigen.
Vektoren sind fundamental in Mathematik, Physik und Ingenieurwesen, da sie es ermöglichen, physikalische Größen wie Kraft, Geschwindigkeit oder Verschiebung kompakt und präzise zu beschreiben.
Grundelemente eines Vektors
Magnitude (Betrag)
Länge oder Größe des Vektors
Richtung
Richtung im Koordinatensystem
Komponenten
Einzelne Zahlenwerte (x, y, z, ...)
Orientierung
Richtungssinn (von-nach)
- Seine Länge (Magnitude oder Betrag)
- Seine Richtung im Raum
- Seine Orientierung (Anfangs- und Endpunkt)
- Die Position ist nicht eindeutig - Vektoren können verschoben werden
Notation und Darstellung
Schreibweisen für Vektoren
Vektoren können auf verschiedene Arten notiert werden:
Für einen 2D-Vektor mit Komponenten \(x\) und \(y\):
Für einen 3D-Vektor mit Komponenten \(x\), \(y\) und \(z\):
Beispiel: Der Vektor \(\vec{a} = \begin{bmatrix} 2 \\ 3 \end{bmatrix}\) hat die x-Komponente 2 und die y-Komponente 3.
Betrag eines Vektors
Der Betrag oder die Magnitude eines Vektors ist seine Länge. Sie wird berechnet, indem die geometrische Interpretation des Vektors als Hypotennuse eines rechtwinkligen Dreiecks verwendet wird.
Betrag in 2D
Betrag in 3D
Allgemeine Form
Beispiel: Der Betrag des Vektors \(\vec{a} = \begin{bmatrix} 3 \\ 4 \end{bmatrix}\) ist:
Vektoren im Koordinatensystem
Um Vektoren zu visualisieren, verwendet man ein Koordinatensystem mit zwei oder mehr Achsen. Im 2D-Fall sind dies die X-Achse (horizontal) und die Y-Achse (vertikal).
Um einen Vektor \(\vec{v} = \begin{bmatrix} 2 \\ 3 \end{bmatrix}\) zu zeichnen:
- Starten Sie am Ursprung (0, 0)
- Gehen Sie 2 Einheiten in x-Richtung nach rechts
- Gehen Sie 3 Einheiten in y-Richtung nach oben
- Zeichnen Sie einen Pfeil vom Ursprung zum Endpunkt (2, 3)

Vektor \(\vec{a} = \begin{bmatrix} 2 \\ 3 \end{bmatrix}\) im Koordinatensystem mit Magnitude \(|\vec{a}| = \sqrt{13} \approx 3.61\)
Gleiche Vektoren
Zwei Vektoren sind gleich, wenn sie die gleiche Länge, Richtung und Orientierung haben. Die Position im Koordinatensystem ist irrelevant - nur die Komponenten zählen.
Definition von Gleichheit
Geometrisch bedeutet das: Gleiche Vektoren sind parallel verschobene Kopien voneinander. Sie liegen nicht notwendigerweise am gleichen Ort, sondern haben nur die gleichen Eigenschaften.
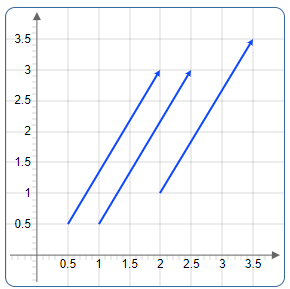
Gleiche Vektoren: Alle drei Pfeile haben die gleiche Länge und Richtung, daher sind sie gleich
Gegenvektor
Der Gegenvektor (oder negative Vektor) eines Vektors \(\vec{a}\) ist ein Vektor, der die gleiche Länge, aber die entgegengesetzte Richtung und Orientierung hat.
Definition des Gegenvektors
Beispiel:
Wichtige Eigenschaft: \(\vec{a} + (-\vec{a}) = \vec{0}\) (Nullvektor)
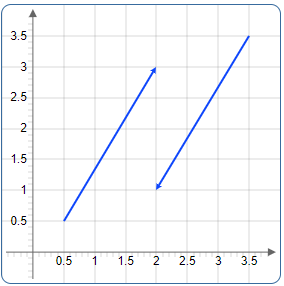
Gegenvektor: Der blaue Vektor ist der Gegenvektor des roten Vektors - gleiche Länge, entgegengesetzte Richtung
Parallele Vektoren
Zwei Vektoren sind parallel, wenn sie in die gleiche oder entgegengesetzte Richtung zeigen. Sie können unterschiedliche Längen haben, müssen aber kollinear sein (auf einer Geraden liegen).
Definition von Parallelität
Vektoren \(\vec{a}\) und \(\vec{b}\) sind parallel, wenn es ein Skalar \(\lambda\) gibt, so dass:
Beispiele:
- \(\vec{a} = \begin{bmatrix} 2 \\ 3 \end{bmatrix}\) und \(\vec{b} = \begin{bmatrix} 4 \\ 6 \end{bmatrix}\) sind parallel, da \(\vec{b} = 2\vec{a}\)
- \(\vec{a} = \begin{bmatrix} 1 \\ 2 \end{bmatrix}\) und \(\vec{c} = \begin{bmatrix} -2 \\ -4 \end{bmatrix}\) sind parallel, da \(\vec{c} = -2\vec{a}\)
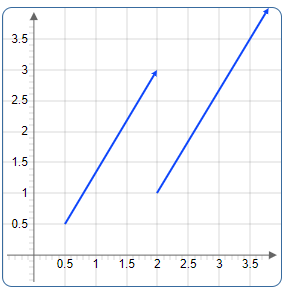
Parallele Vektoren: Alle Vektoren zeigen in die gleiche Richtung oder entgegengesetzt, können aber unterschiedliche Längen haben
Spezielle Vektoren
- Nullvektor \(\vec{0}\): Vektor mit Betrag 0, alle Komponenten sind 0
- Einheitsvektor: Vektor mit Betrag 1 (wird mit \(\hat{u}\) oder \(\vec{e}\) notiert)
- Basisvektoren: \(\vec{e}_1 = \begin{bmatrix} 1 \\ 0 \end{bmatrix}\) und \(\vec{e}_2 = \begin{bmatrix} 0 \\ 1 \end{bmatrix}\) im 2D-Fall
- Ortsvektor: Vektor vom Ursprung zu einem Punkt
Normalisierung eines Vektors (zu Einheitsvektor)
Zusammenfassung
Definition
Objekt mit Größe und Richtung, dargestellt als Zahlenliste oder Pfeil
Betrag
\[\displaystyle |\vec{v}| = \sqrt{v_1^2 + v_2^2 + \cdots + v_n^2}\]
Gleichheit
Zwei Vektoren sind gleich, wenn alle Komponenten gleich sind
Parallelität
\[\displaystyle \vec{b} = \lambda \vec{a} \text{ für ein Skalar } \lambda\]
|
|