Matrix Z-Axis Rotation
Calculator for the rotation of a 3x3 matrix around the Z axis
Z-Axis Rotation Calculator
Instructions
Enter the rotation angle for rotation around the Z-axis.
- Unit: Switch between degrees or radians
- Mode: Active (rotate object) or Passive (rotate coordinates)
Z-Axis Rotation - Overview
Z-Axis Rotation
The Z-axis rotation (Yaw) rotates objects or coordinates around the Z-axis. The matrix rotation distinguishes between active and passive rotation.
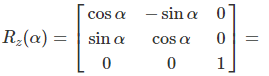
Rotation Matrix Formula
The general formula for rotation around the Z-axis:
\(R_z(\alpha) = \begin{bmatrix} \cos \alpha & -\sin \alpha & 0\\ \sin \alpha & \cos \alpha & 0\\ 0 & 0 & 1 \end{bmatrix}\)
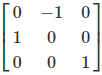
Example: 90° Rotation
Active rotation (counterclockwise):
\(R_z(90°) = \begin{bmatrix} 0 & -1 & 0\\ 1 & 0 & 0\\ 0 & 0 & 1 \end{bmatrix}\)
Rotation Modes
- Active Rotation: Rotates the vector/object in the coordinate system (counterclockwise). Also called geometric transformation.
- Passive Rotation: Rotates the coordinate system (clockwise). The vector remains unchanged.
Description of Matrix Z-Axis Rotation
Active Rotation
With active rotation, the vector or the object is rotated in the coordinate system. The active rotation is also called a geometric transformation. The rotation is counterclockwise.
Example: 90° Rotation of the Z-axis
Properties
- Axis: Rotation around Z-axis (Yaw)
- Direction: Counterclockwise (when looking along positive Z-axis)
- Third row: Always [0, 0, 1] (Z-component unchanged)
- Orthogonal: RT = R-1
- Determinant: det(R) = 1
- 2D-like: Essentially a 2D rotation in the XY-plane
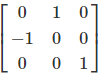
Passive Rotation
With passive rotation, the coordinate system is rotated. The vector remains unchanged. The rotation is clockwise.
Example: 90° Rotation of the Z-axis
Matrix Structure
Active Rotation (counterclockwise):
\(R_z(\alpha) = \begin{bmatrix} \cos \alpha & -\sin \alpha & 0\\ \sin \alpha & \cos \alpha & 0\\ 0 & 0 & 1 \end{bmatrix}\)
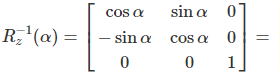
Passive Rotation (clockwise):
\(R_z^{-1}(\alpha) = \begin{bmatrix} \cos \alpha & \sin \alpha & 0\\ -\sin \alpha & \cos \alpha & 0\\ 0 & 0 & 1 \end{bmatrix}\)
Practical Applications
Aerospace & Robotics:
- Aircraft yaw control (left/right)
- Drone heading control
- Robotic base rotation
- Satellite yaw axis control
Computer Graphics & Gaming:
- Camera pan (looking left/right)
- Character turning animations
- Top-down game rotations
- Compass orientation
Key Characteristics
The Z-axis rotation matrix is unique in that its third row and third column remain mostly constant [0, 0, 1], meaning the Z-component of any vector is unchanged during rotation. Only the X and Y components are affected. This rotation is commonly called "Yaw" in aerospace applications and represents left/right turning. It's essentially a 2D rotation extended to 3D space.
Related Rotations
For complete 3D orientation, you may need to combine rotations around multiple axes:
- X-axis rotation (Roll): Barrel roll rotation
- Y-axis rotation (Pitch): Nose up/down rotation
- Combined rotations: Use Euler angles or quaternions for full 3D rotation
|
|